
Robot que corre como gato
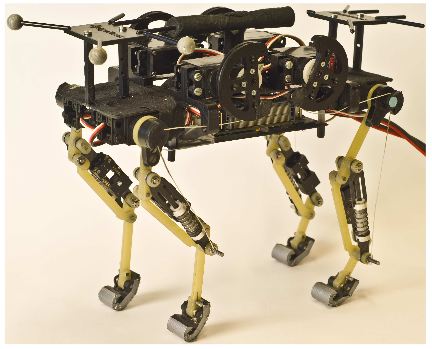
Cachorro de chita (crédito: A. Sproewitz et al./International Journal of Robotics Research)
Gracias a sus patas similares a las de un gato, el robot chita de cuatro patas de la Escuela Politécnica Federal de Lausana (EPFL) es pequeño, ligero y el más rápido dentro de su categoría (pequeños cuadrúpedos menores a 30 kilogramos): puede correr hasta 5 kilómetros por hora (3.1 millas por horas) –casi siete veces la longitud de su peso en un segundo.
Este robot fue desarrollado por el Laboratorio de Biorobótica EPFL (Biorob), y servirá de plataforma para investigación en locomoción y biomecánica.
Los robots desarrollados a partir de este concepto eventualmente se usarán en misiones de búsqueda y rescate, o para exploración.
Aunque no es tan ágil como un gato real, tiene características excelentes de auto-estabilización al correr a toda velocidad o en una ruta que incluya obstáculos. Es extremadamente ligero, compacto, robusto y puede fácilmente ensamblarse a partir de materiales baratos y disponibles.
El diseño se basa en la observación meticulosa y la fiel reproducción de las piernas de un felino. El tamaño de un gato doméstico, el número de segmentos –tres en cada pierna– y sus proporciones son las mismas que las de los gatos. Se usan suspensiones para reproducir tendones, y se utilizan actuadores –pequeños motores que convierten la energía en movimiento– para reemplazar los músculos.
“Esta morfología proporciona al robot las propiedades mecánicas que benefician a los gatos… una gran habilidad para correr y elasticidad en los puntos correctos para garantizar estabilidad”, explica Alexander Sprowitz, científico de Biorob.
De acuerdo a Auke Ijspeert, director de Biorob, “el objetivo a largo plazo es reproducir máquinas rápidas y ágiles para su uso en exploración, por ejemplo, búsqueda y rescate en situaciones de desastre natural”.
Más información aquí.

Comentarios